Project
Nose-Deployed Drogue Rocket
The Prototype
This project is a preliminary design for a rocket that has not yet been built, representing the first iteration in its development. It includes four actuated canards, a parachute hatch, a two-degree-of-freedom ball gimbal, and a deployable nose drogue to manage descent orientation. The main objective is to deepen my understanding of robust control systems in dynamic, underactuated environments. The rocket is intended to maintain stability both during powered ascent and unpowered descent using its aerodynamic control surfaces.
Gimbaled Thrust Vectoring
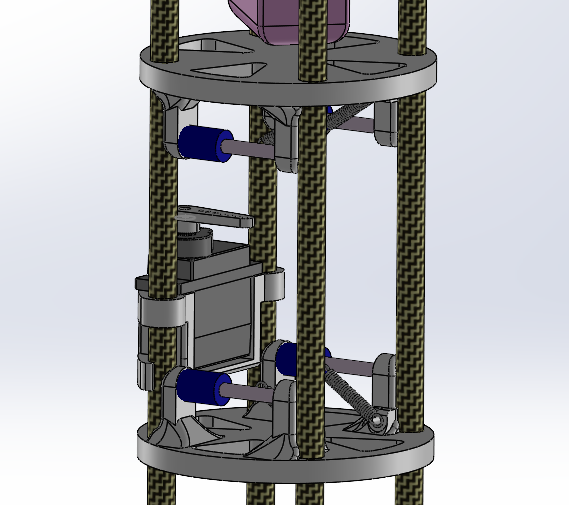
The gimbal is a two-degree-of-freedom system actuated by two servo motors, allowing for ±7 degrees of rotation in both pitch and yaw axes. Its purpose is to vector the rocket’s motor during flight, providing active control authority over the vehicle’s orientation. By adjusting thrust direction, the gimbal enables real-time correction of instability and maintains the rocket’s desired heading. This mechanism is key to achieving robust stability under powered flight, especially in the presence of external disturbances.
Canard Box
The canard box contains four servos, each mechanically linked to a canard axle that is supported by two ball bearings to handle the shear loads experienced during flight. Each axle is equipped with a dedicated magnetic encoder to provide real-time rotational feedback to the flight controller. This setup enhances the controller’s ability to estimate the rocket’s state with greater accuracy throughout ascent. With improved state feedback, the control system can more reliably predict vehicle dynamics and issue appropriate control commands for stable flight.
Nose Drogue
The nose-deployed drogue consists of four panels connected by linkages to a central rod, designed to deploy outward when released by a servo-actuated mechanism. Upon deployment, the panels shift the rocket’s center of pressure above its center of gravity, passively stabilizing it in a tail-down orientation during descent. In the current flight plan, this mechanism concludes the active portion of the mission, followed by a standard parachute deployment for recovery. Future iterations aim to build on this orientation method as a precursor to achieving a fully powered vertical landing.
Parachute Deployment
The parachute deployment mechanism uses four spring-loaded linear bearings designed to push outward when released. A servo actuates the release of the hatch panel, allowing the springs to drive the deployment motion. While the concept is simple and compact, its reliability and reusability remain uncertain and will need to be validated through physical testing.