Project
Modular Flight Controller
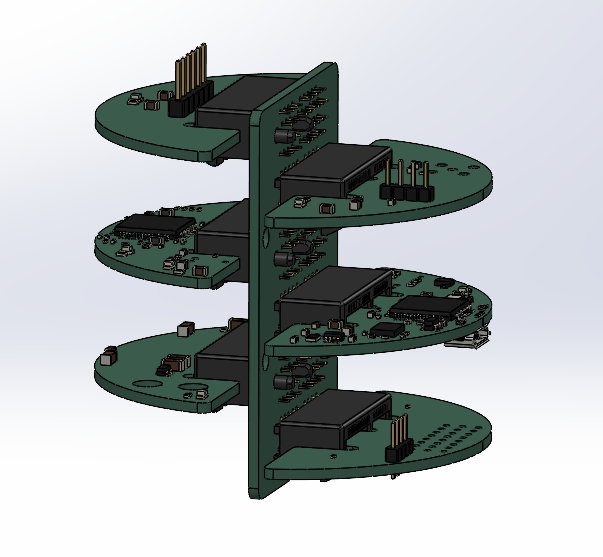
Vertical Module Stack
This project is a modular flight controller stack currently in the design phase, intended for use in experimental rockets and other robotics applications. The stack is composed of several custom-designed PCBs that interconnect via a central backplane using PCI-style connectors.
.png?height=557&width=603)
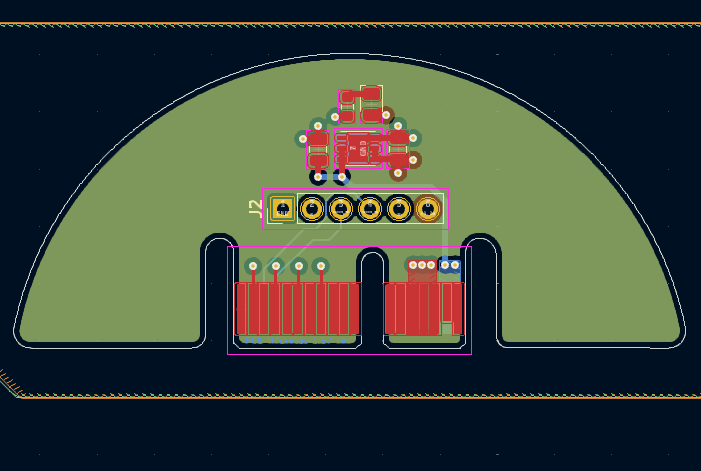
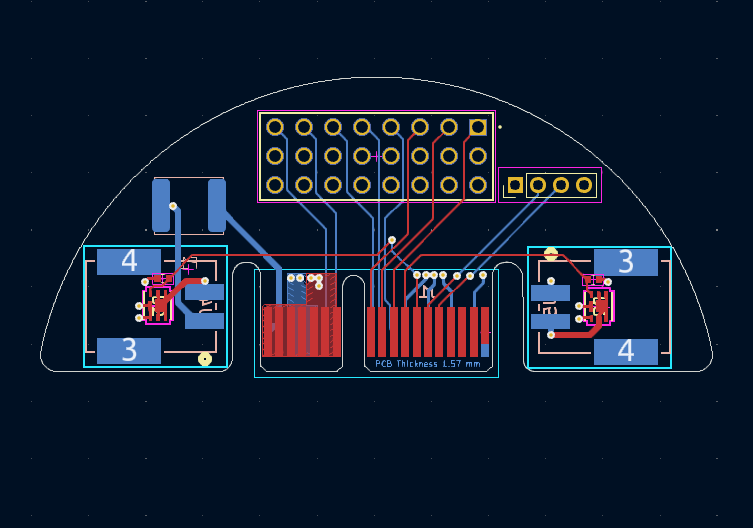
Backplane
The backplane uses PCI-style connectors to stack and interface all modules. It simplifies wiring and allows modular testing, hot-swapping, and future expansion of the system.
Flight Control Unit
The FCU is built around an STM32H7 microcontroller and serves as the central command module. It receives state estimates from the navigation unit and generates control outputs. It includes 8 PWM channels for motor or actuator control, 2 general-purpose GPIO lines, and an SD card slot for onboard logging.
State Estimation Module
This board uses an STM32F4 microcontroller with an embedded IMU and barometer, and is connected to the GPS and telemetry modules. It performs sensor fusion to estimate the system’s state and transmits this information to the FCU for control decisions.
GPS Module
A compact board featuring the MAX-M8C GNSS module. It provides reliable positioning data to the navigation unit in a small form factor ideal for embedded applications.
Telemetry Module
Due to tight space constraints with embedded transceivers, this board currently includes a breakout pin header for mounting an external radio module in the future, giving flexibility based on mission needs.
IO Module
Designed to interface with external payloads and subsystems, this board offers 8 PWM outputs and 2 independently fused pyro channels for tasks like deployment or ignition events in rocketry.