My Engineering Projects
I enjoy building things. Here are some of my recent projects.
For those done with a team, you can find the members listed on each project’s page.
Nose-Deployed Drogue Rocket
A modular, thrust-vectoring rocket featuring STM32-based flight control, GPS, telemetry, IMU, and power modules, with an expanding nose cone for passive descent stability, actuated canards, a dual-axis gimbal, and parachute deployment system.
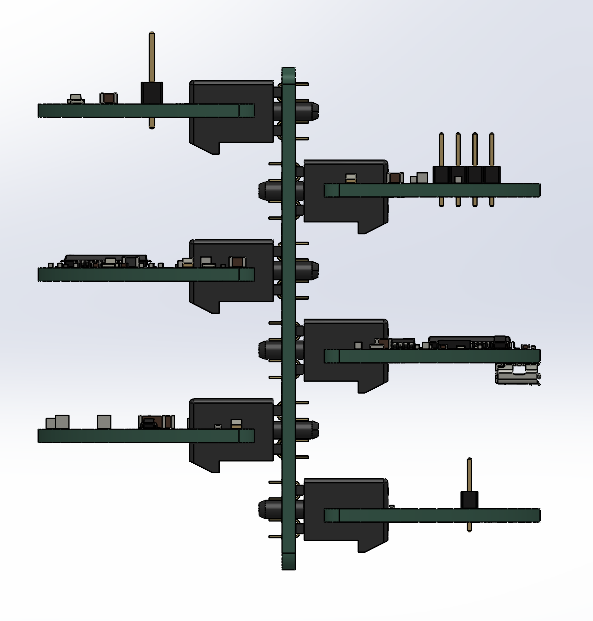
Modular Flight Controller
A modular rocket flight controller built around STM32H7 and F4 MCUs, featuring swappable boards for GPS, telemetry, power distribution, IO, and IMU/barometer to allow easy debugging and quick replacement of faulty designs.
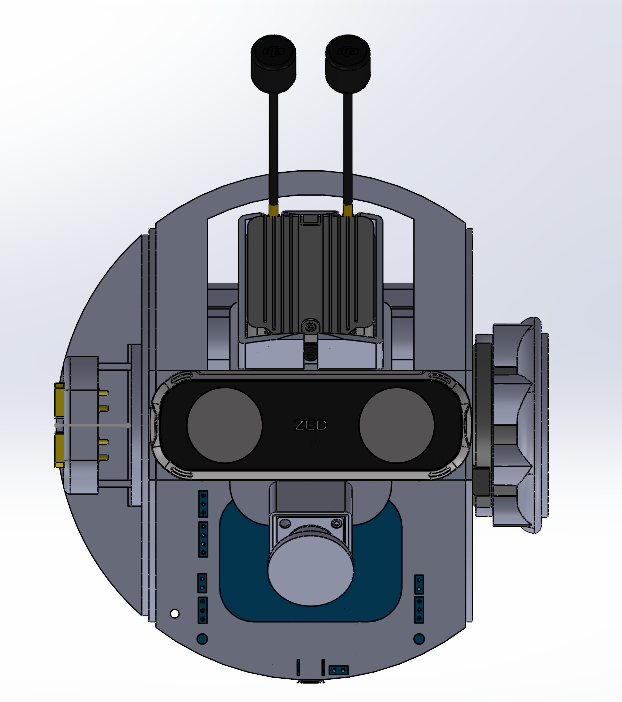
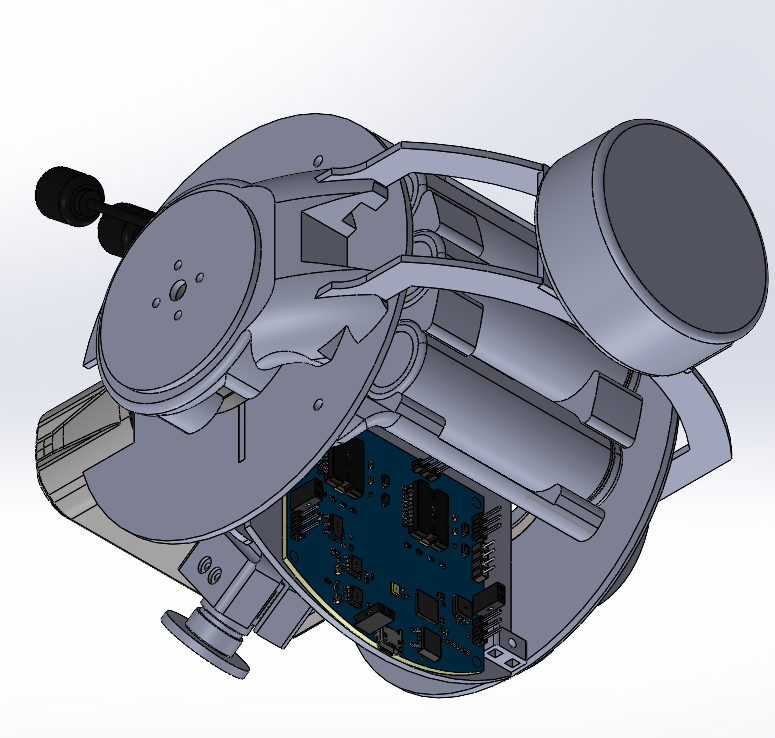
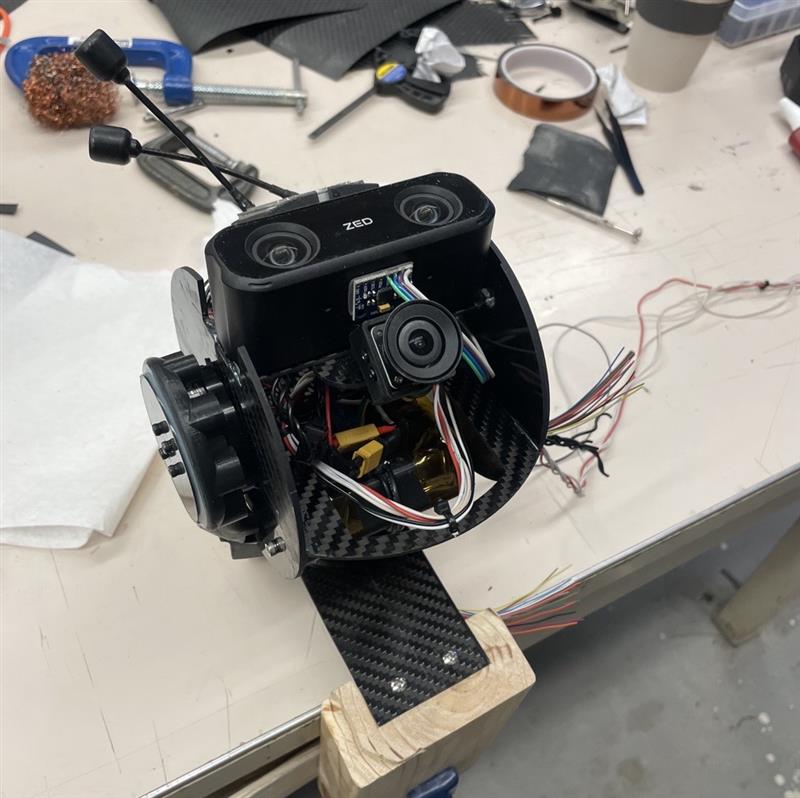

2 DOF Ball Gimbal
A 2-DOF ball gimbal actuated by BLDC motors with FOC control, designed to stabilize and command the orientation of a DJI FPV system and ZED X Mini depth camera, featuring a power system with a 3-cell 21700 Li-ion pack to offset the camera weight, and a custom control board with IMU for angle stabilization.
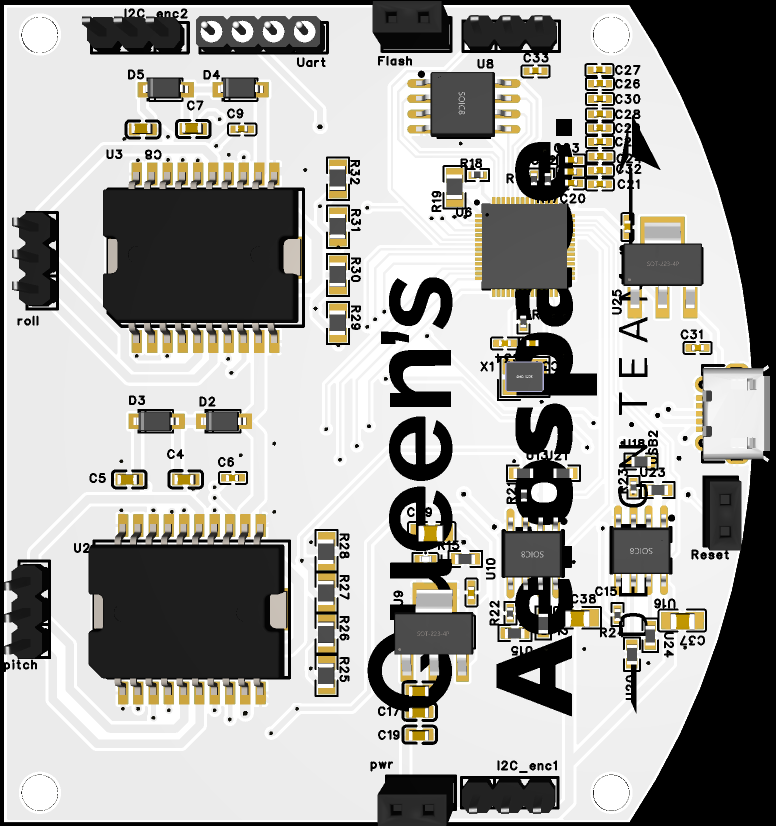
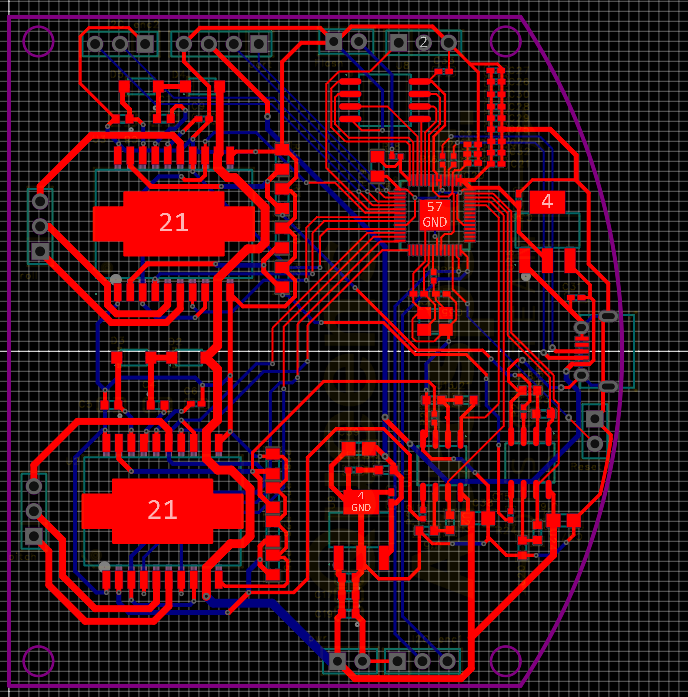
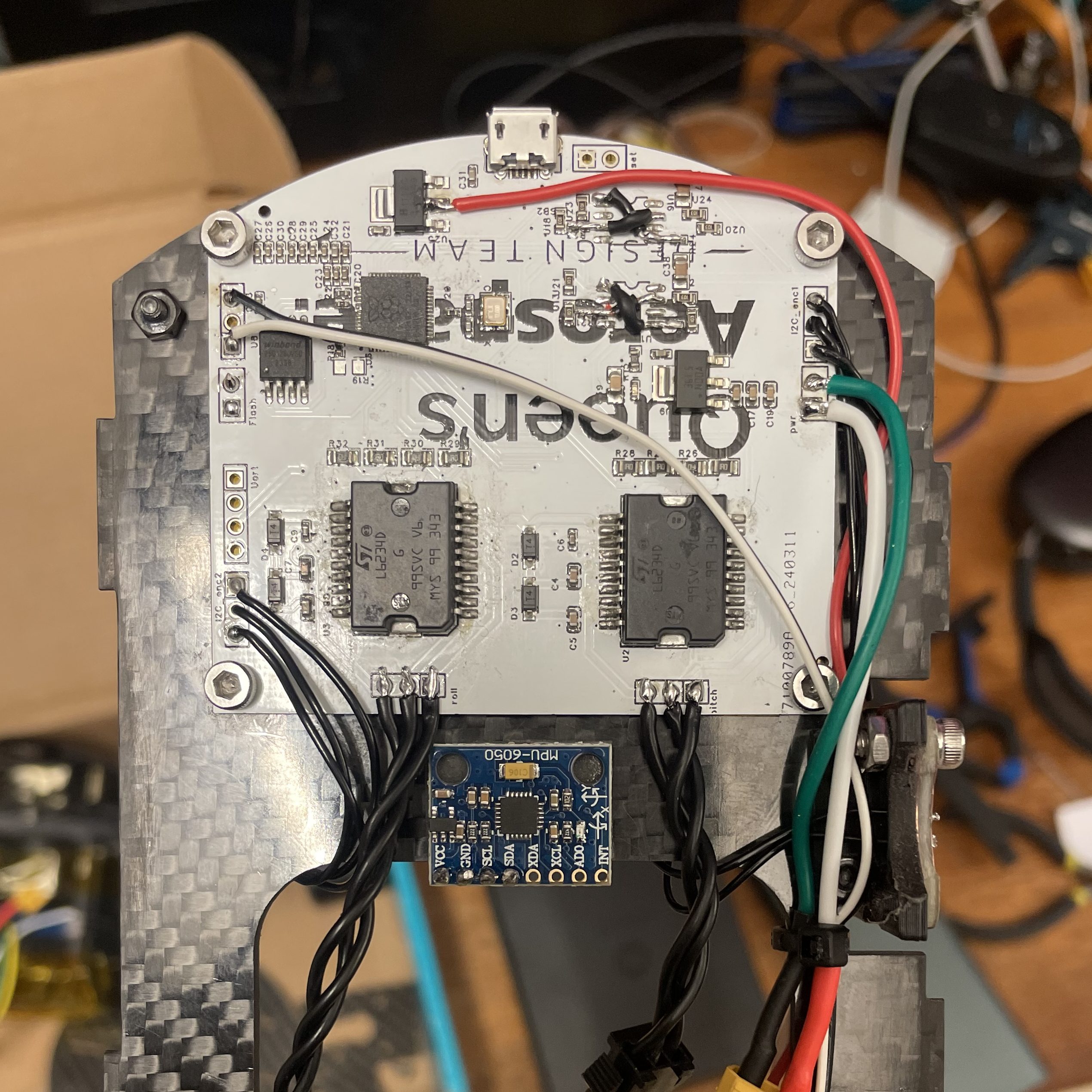
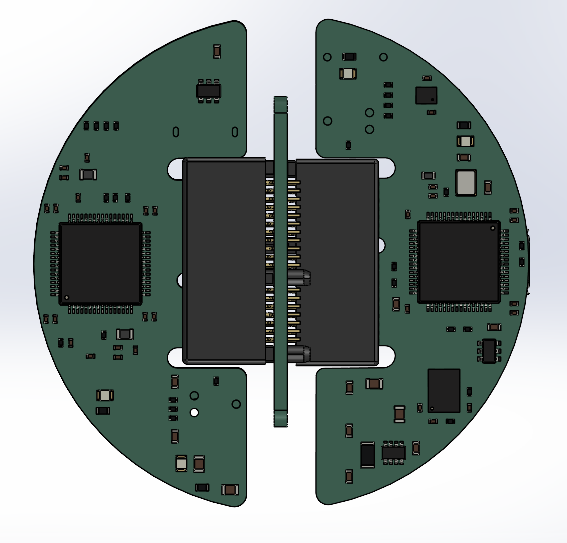
Field Oriented Control Board
A custom gimbal control board based on the RP2040 MCU, featuring dual L6234PD motor drivers for BLDC control, I2C interfaces for IMU and motor encoders, and a PWM input for receiving external angle commands.


Canadian UAS Competition
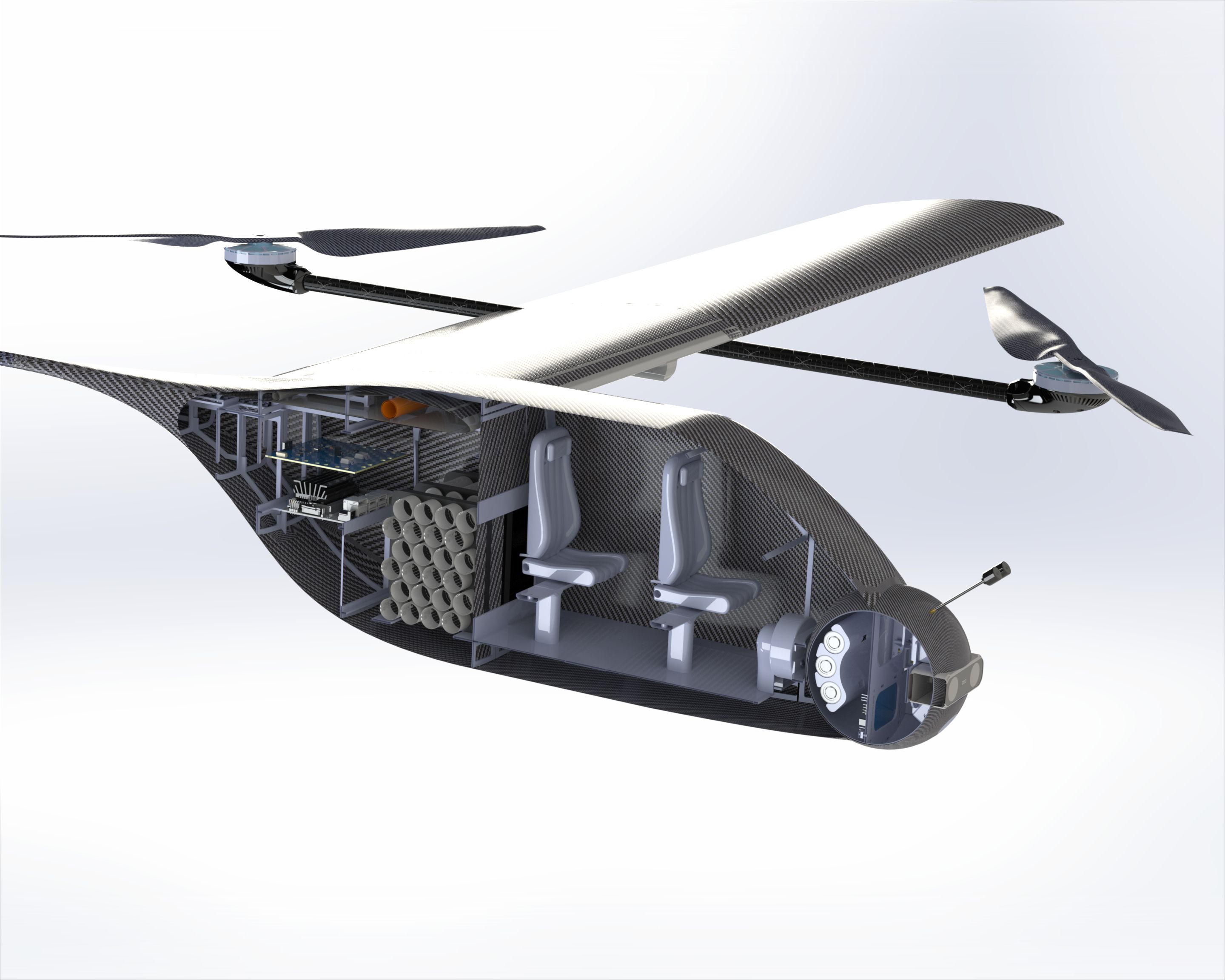
Led a team in the Canadian UAS competition to develop a small-scale autonomous passenger VTOL capable of endurance flight and complex overhang landings, my main technical contributions being the designing the Li-ion battery packs, power distribution board, and full system wiring, gaining firsthand experience in the challenges of large-scale engineering coordination.

International Micro Air Vehicles Competition
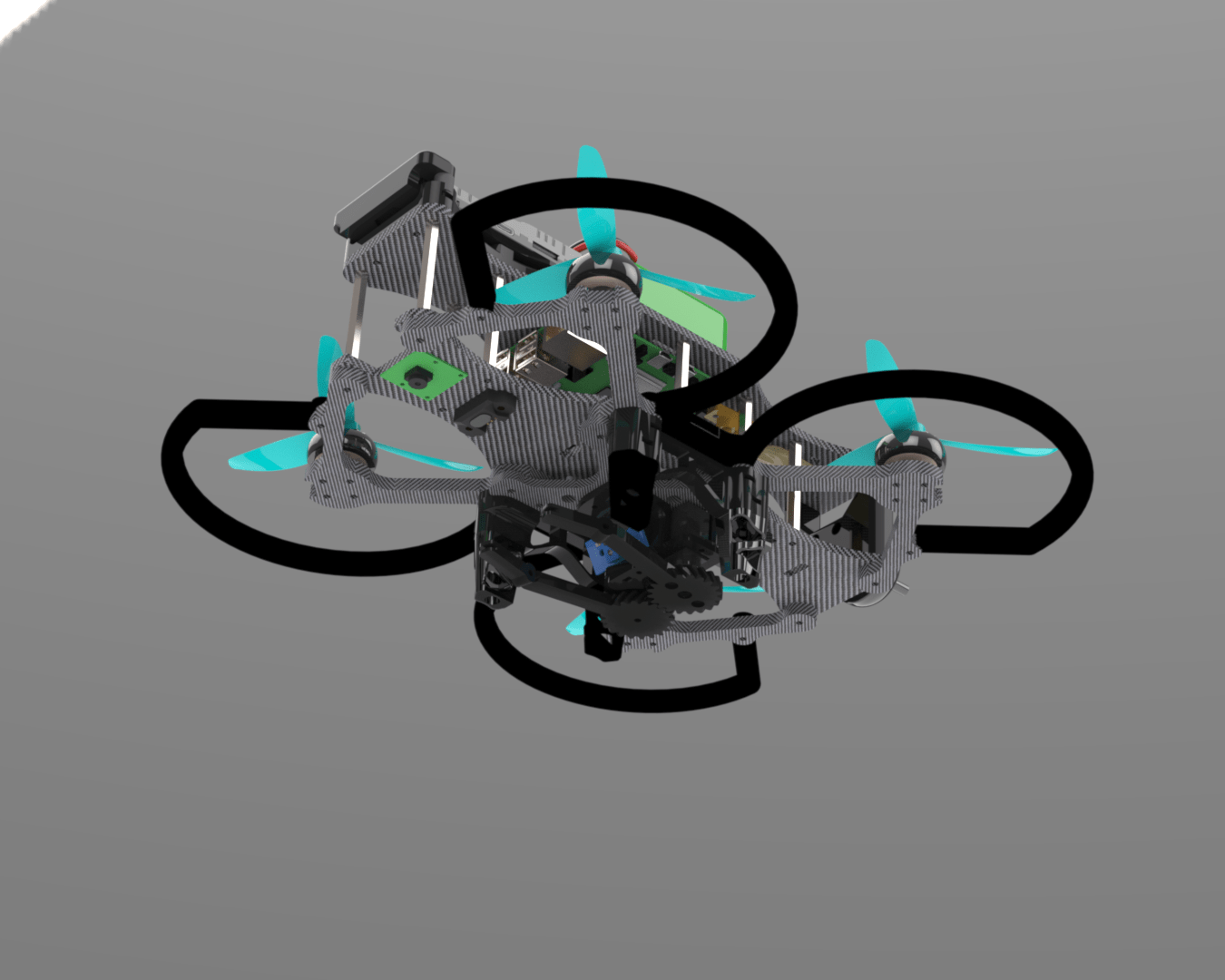
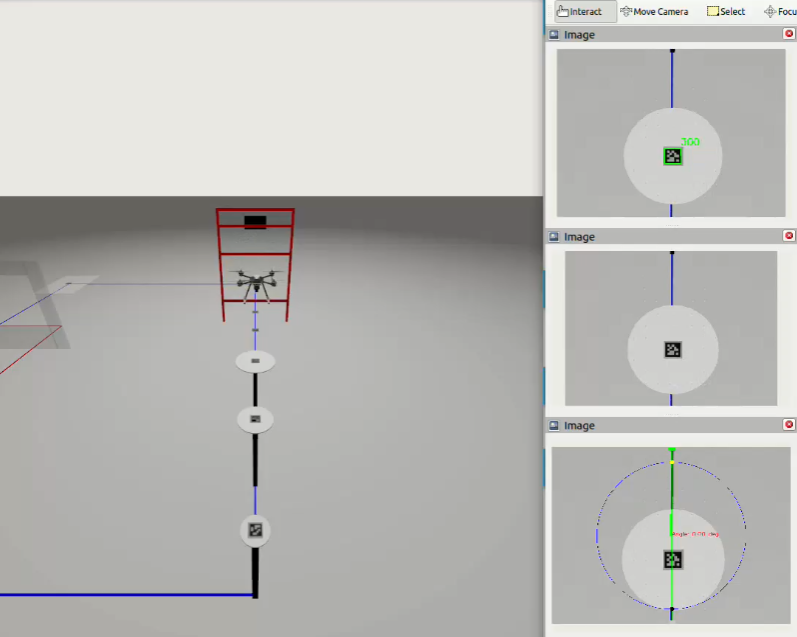
Designed and built an autonomous indoor drone for the IMAV competition, integrating a Raspberry Pi, Pixhawk 6C, camera, rangefinder, and optical flow to enable line following, precision landing, navigation, and object retrieval.


Autonomous Carbon Dioxide Mapping Robot
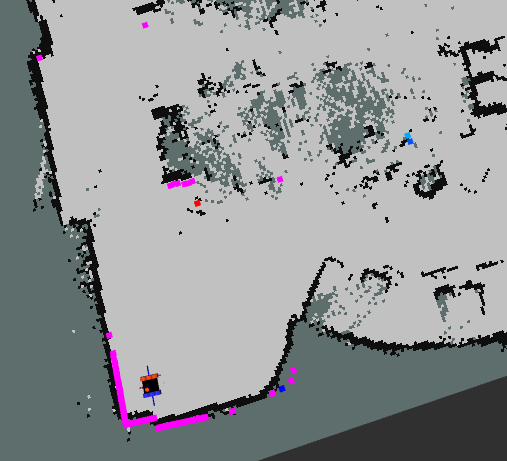
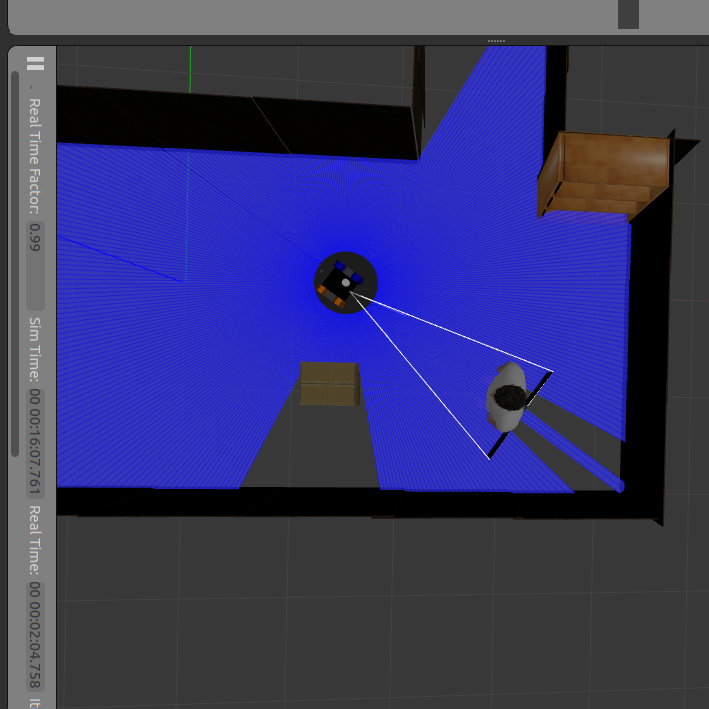
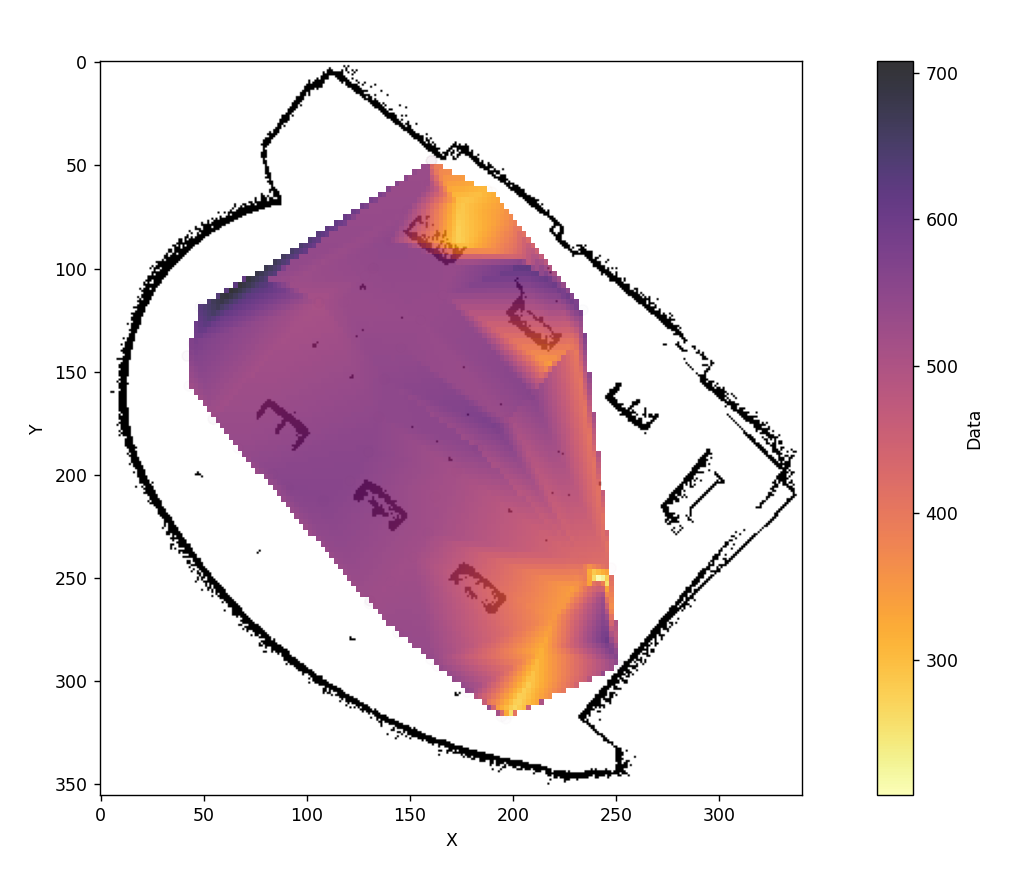
A 4-wheeled skid-steer robot powered by a Raspberry Pi 4B, RPLIDAR, and Arduino Uno with L298N motor driver, running ROS2 with NAV2 to autonomously map and navigate indoor environments while logging CO₂ concentration data.

VTOL Design
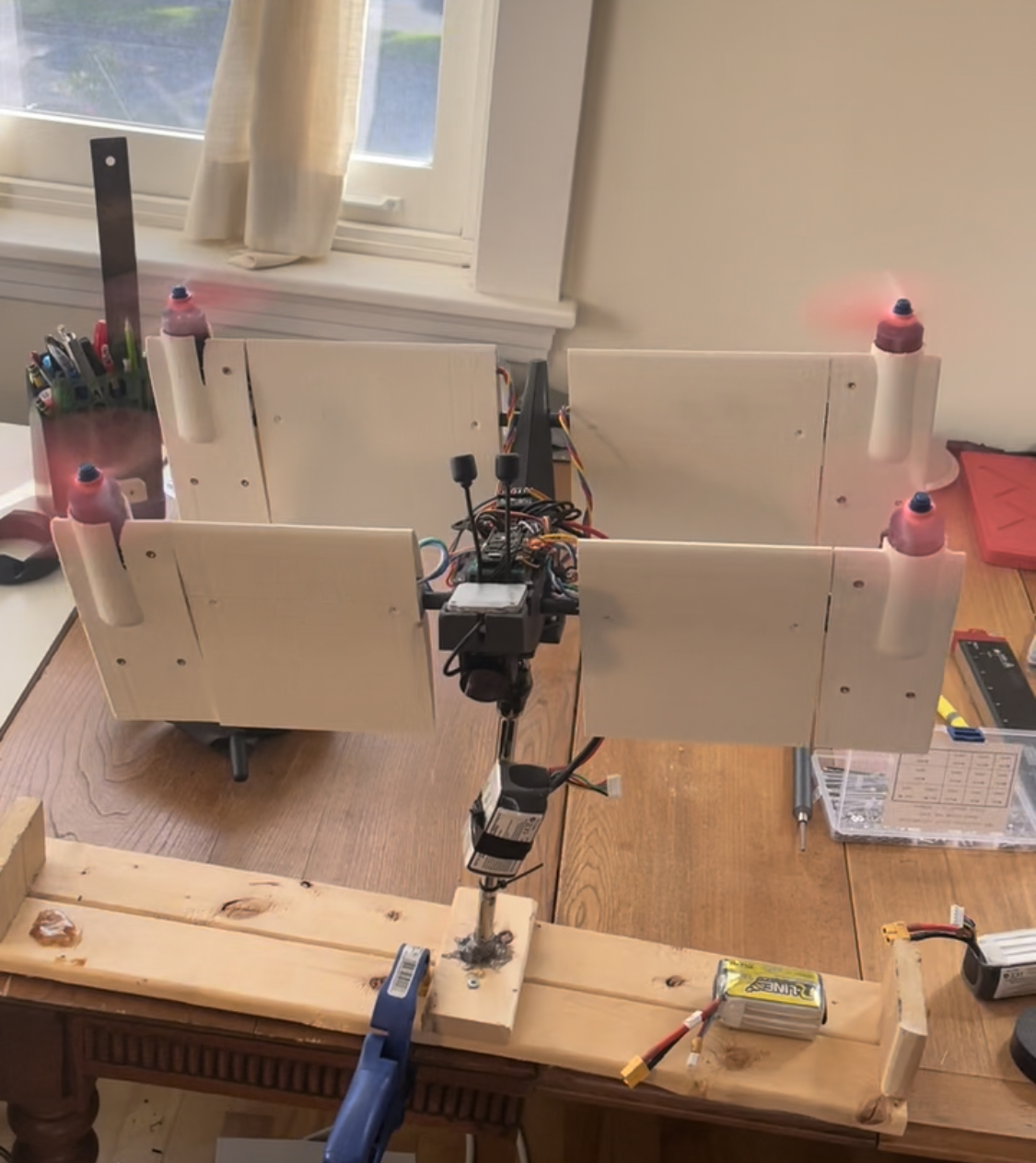
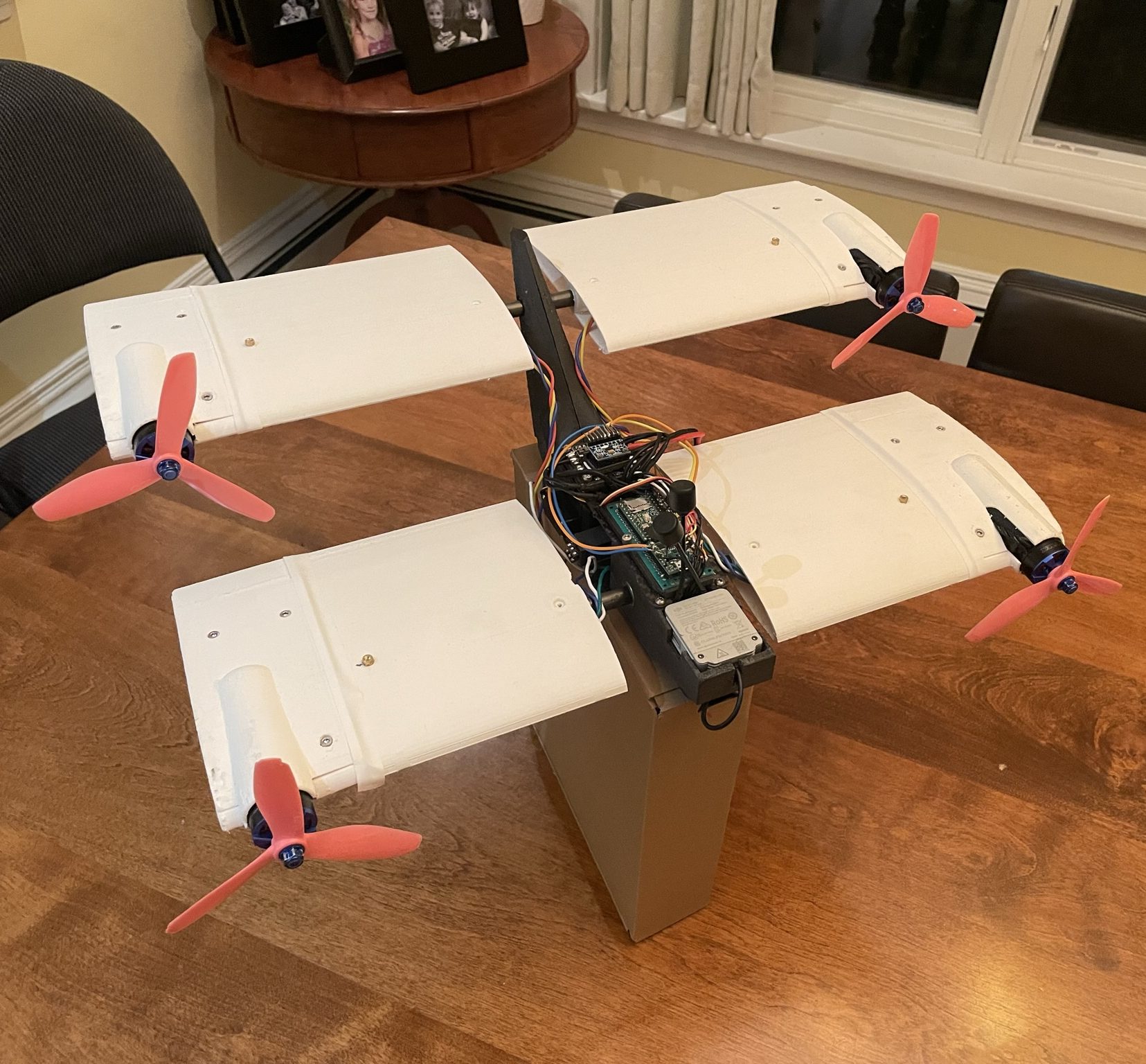
A VTOL UAV combined the maneuverability of a quadrotor with the efficiency of fixed-wing flight, controlled by a Teensy microcontroller; while the novel design proved infeasible within the project timeline due to challenges in active stabilization and insufficient thrust-vectoring response, the project delivered stable quadcopter flight, precise wing actuation, and valuable insights into the role of passive stability in aircraft design.

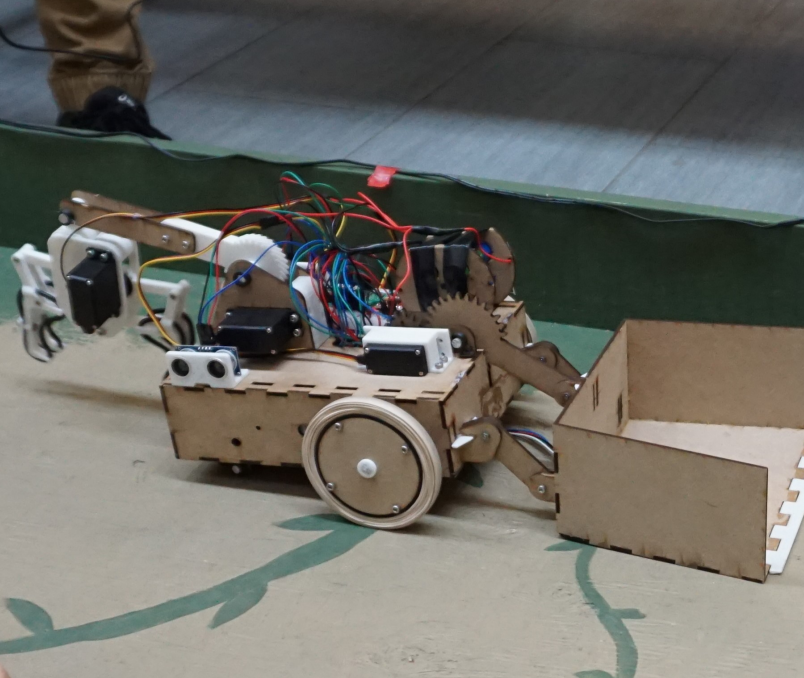
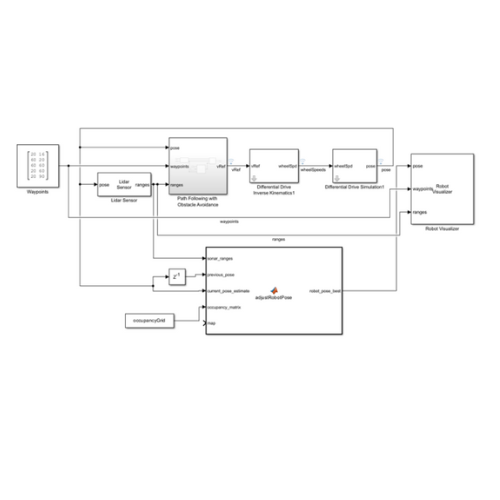

Semi-Autonomous Robot Design
A 'rescue' competition robot featuring particle filter localization using fixed ultrasonic sensors, which I developed and tested, revealing key limitations in sparse sensor data and emphasizing the value of richer observations for accurate state estimation.